As I mentioned in the last post, in his new book, The Zoologist’s Guide To The Galaxy, Arik Kershenbaum makes a well -organized and stepwise case for the hypothesis that, if there is alien life out there, we can be confident that it would share a lot of things in common with life on earth, including camera-type eyes, legs, and bilateral symmetry.
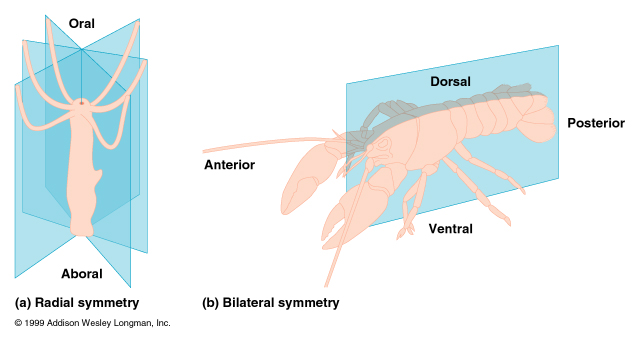
Briefly, bilateral symmetry is when the left side of an animal looks like a mirror image of the right side, reflected along the midline of the body.
Kershenbaum argues that bilateral symmetry is superior, that it has an advantage, in all but rare cases. 99% of animal species are said to be bilateral, and Kershenbaum does not think this is just by chance. He argues that this geometry allows animals to walk, swim, and fly, better, except in a few cases like animals that must walk on very slippery substrates. In that case, he concedes, the stability granted by multitudes of tube feet might give echinoderms, like starfish and sea urchins, an advantage. Since bilateral geometry has been so overwhelmingly favored on earth, he infers, it is probably due to fundamental physics problems of being a body trying to move on surfaces or in fluids, so it will play out in a similar way anywhere. He ends saying we can be confident that MOST alien life forms will be bilateral.
He’s totally right, of course, about almost everything he says, I just think he overplays his hand. Again, back in 1989, when I was studying comparative morphology, I was learning the phylogeny of all life on earth (as best as we knew it then, but genome sequencing has since turned a lot of what I was taught on its head!). When I looked at the tree of life, with its staggering diversity – millions of species – I saw not a riot of crazy experimentation, where every conceivable form was tried out, but one of stubborn conservatism. Yes evolution created a million species of beetle living everywhere from Antarctic ice to the deepest caverns to a single orchid species in one of the rainforests of Borneo. And, though beetles come in a profusion of colors, sizes, metallic finishes, feathery or in rock hard armor, they all have the same body plan. Three body segments, six legs, two antennae. I just felt that the message one gets from reading the history of life on earth is that, hitting on a genome that can command the construction of a successful body plan is so unlikely and so rare that, when it happens, it persists for hundreds of millions of years. Yes it can reiterate with minor variations thousands of, and even a million, times. But those fundamentals are not freely experimented with. Changes in basic body plans are super rare in the fossil record.
When I was 19 I made it my special project to think up non-bilateral alien life forms. But I also didn’t want to copy the non-bilateral animals of earth. Even worse would be to be LESS weird than these earthlings.
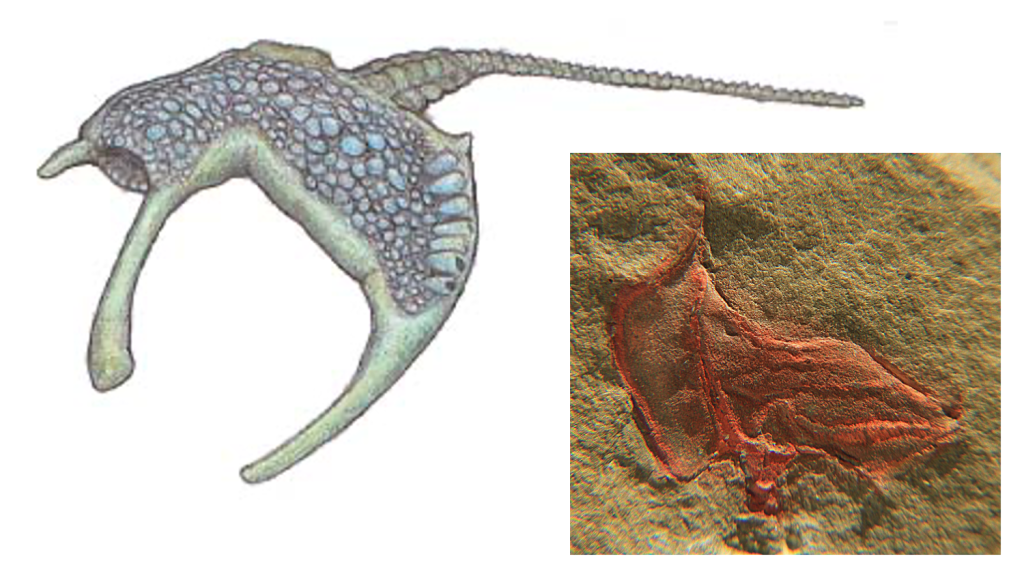
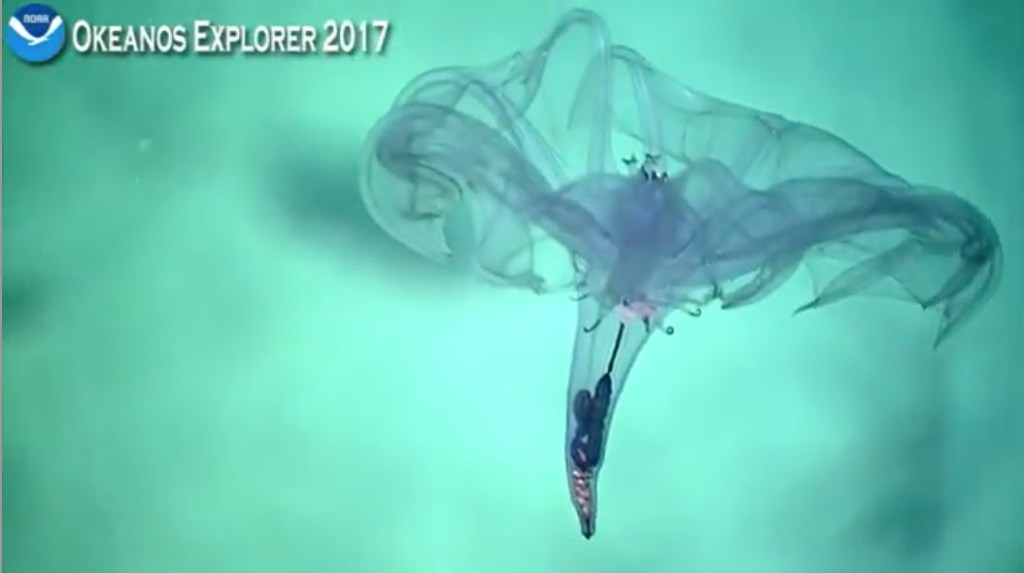
A brief word about non-bilateral life on earth. 1. There is one phylum of non-bilateral animals, the Cnidaria. This taxon is thought to include about 11,000 species. we know them as jellyfish, ctenophores (comb jellies), siphonophores (Portugese Man O’War), hydras, anemones, sea pens, gorgonians, corals, and two groups (subphyla or classes) of parasitic organisms. They are diverse but compare their 11,000 species to ~40,000 vertebrates and somewhere between 1.17 million to 10 million arthropod species. Therefore it is true that the Cnidaria, which are radially symmetrical, are not as numerically dominant. However, I would point out that, when it comes to ideas of physiological superiority, many Cnidarians are active predators, and they don’t just catch plankton, many are exceptionally good at catching and killing fish. Fish, with their bilateral geometry and camera eyes are supposed to be anatomically superior. 2. There is another big phylum, the echinoderms, whose larvae are bilateral but then they undergo a metamorphosis, becoming secondarily radially symmetrical as adults. If bilateral symmetry was a universal advantage that shouldn’t happen. But, as Kershenbaum admits, biology is the science where every rule has an exception (including that one). Echinoderms include ~7,000 species. We are familiar with sea urchins, starfish, sea cucumbers and crinoids, and, in some habitats, like beneath the sea ice of Antarctica, they seem numerically quite dominant. But if you want to see some good candidates for “most alien – looking animals on earth” there are a few echinoderms I would recommend. First are the enigmatic extinct classes in subphylum Homalozoa. I first saw these in the University of Michigan Museum of Natural History and I said out loud “You gotta be kidding me.” But even among living species of pelagic sea cucumbers there are bizarre examples. Consider the totally alien Enypniastes, or Pelagothuria, which seems to have converged, not with bilaterians, but with radial jellyfish!


Two last points before I show you what I came up with 31 years ago. Though these radially symmetrical, or even asymmetrical animals exist, it may still be true that they are more limited in terms of performance than bilaterians are. There are certainly no radially symmetrical cheetahs or peregrine falcons. It is hard for me to picture an animal flying without two symmetrical wings, for example. But my mind is constrained, of course, by the animals I have seen. To some extent, human engineering can help us settle the issue of whether there are non-bilateral geometries that can function at high levels of performance in locomotion. Airplanes are bilaterally symmetrical. But Missiles are radial. And a helicopter prop, jet turbine, hot air (or hydrogen) balloon, and even some kites and “flying tube” paper airplanes are not bilateral. Running robots for the most part are built to be bilateral, but some of the earliest breakthroughs achieved by the guys that now run Boston Dynamics (with their shocking, uncanny dog-shaped and humanoid robots) were achieved by learning about instability in one-legged, pogo stick-like, hopping prototypes. In researching this post I looked at swimming robots and I was surprised to find that, though most are bilateral, several are radial! In addition to robots designed to mimic jellyfish, there are radial “eels”, and Khalifa University even has a large, radial, flagella-driven model.
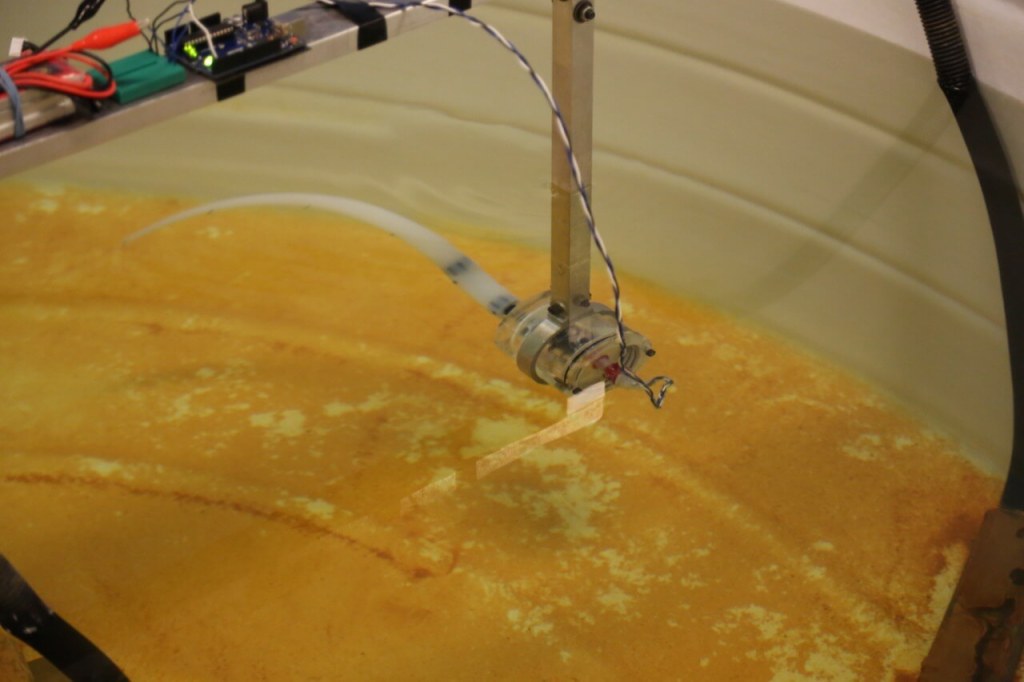
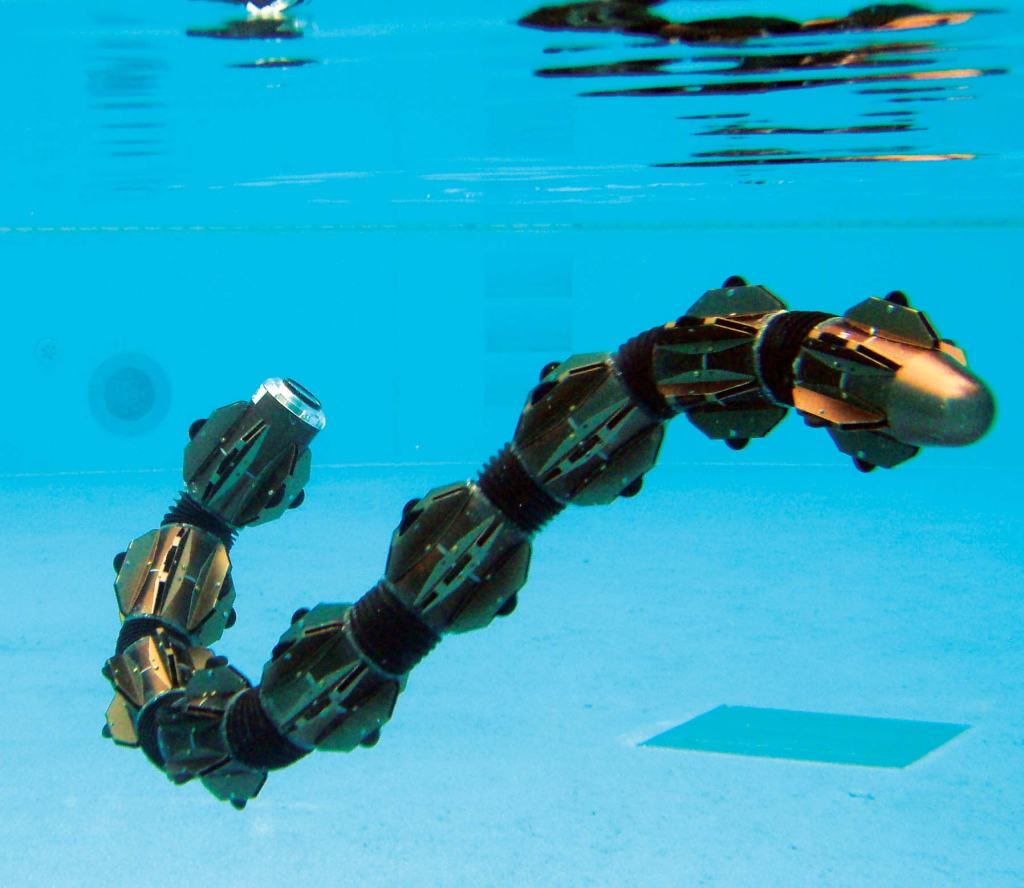


Flagella are important for another reason. Briefly, if, as I keep insisting, the reason that 99% of animals on earth are bilateral is that they all inherited this geometry from a common ancestor, then a good way to test my hypothesis would be to look at (much) more genetically diverse organisms that also move rapidly. Now, Kershenbaum makes a good point that active organisms, that move on more or less our same time frame as us, would be recognized by us as “animals” in a functional sense. If so, then we should look at protists; the single celled eukaryotic organisms that were the most highly evolved functional “animals ” on earth from 2.1 billion until just 600 million years ago or so. It is not generally appreciated just how diverse protists are. We evolved from one lineage of protists, the Opisthokonta, and, from that lineage came all multicellular fungi and animals. Fungi and Animalia are such big and disparate divisions of life that we call them Kingdoms. But when we analyze the genetic disparity of life we find that the protists are WAY more diverse than multicellular animals. In the figure below each named group is, roughly speaking, its own kingdom-level group, from an empirical genomic perspective. Yet, most of the fast ones share flagella as their means of propulsion. And not a one of them is bilateral. Kershenbaum only mentions protists once and, in general, he focuses on the possibilities for life that is much larger in scale. But I think it would be productive for him to apply his theoretical framework to protists and see what he concludes. I always assumed that flagella do not work at larger scales but Khalifa University says their radial flagellate robot is super energy efficient.

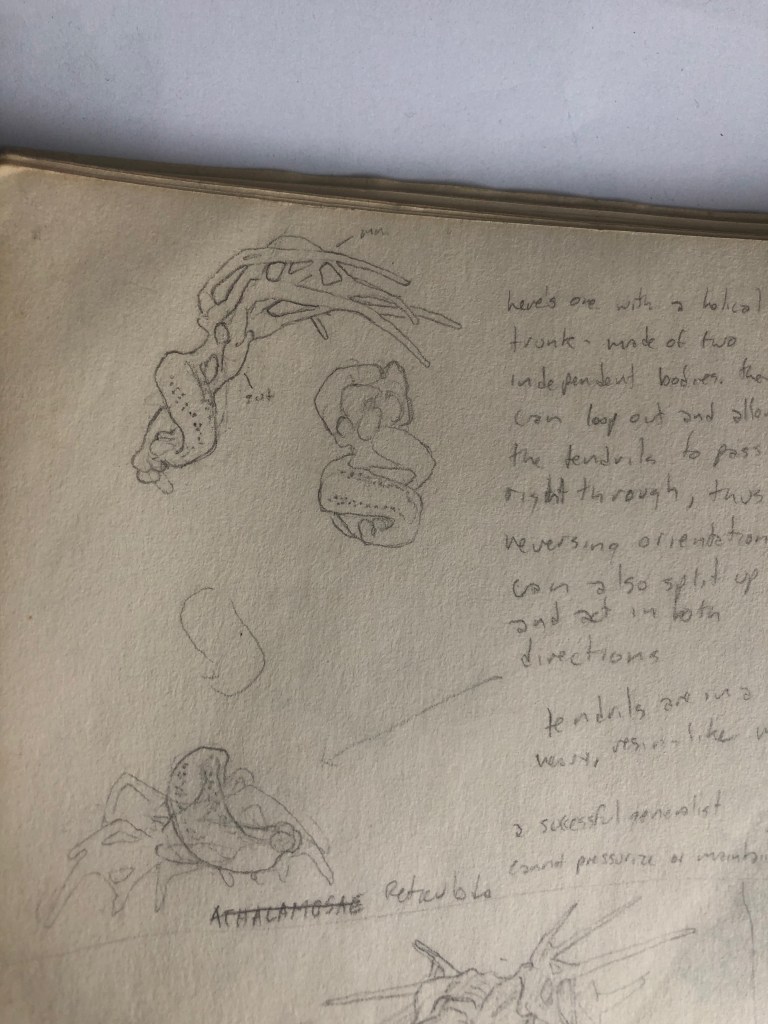
I can imagine other planets where large moving organisms are organized more like trees are on earth, where maybe there are bilateral modules, like individual leaves or flowers, but they might be arranged as whorls, helically along an axis. Or as divided and subdivided branches. Or as fractals, like some of the Ediacaran organisms were, or like the arms of basket stars are today, and are still able to walk and swim perfectly well.
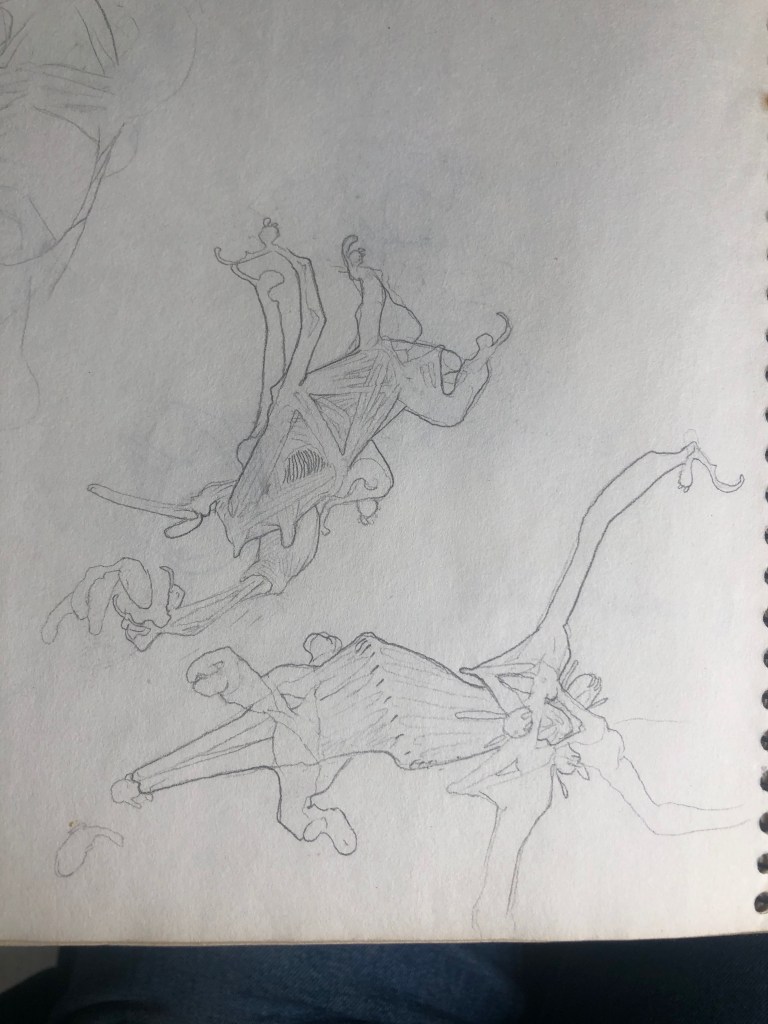
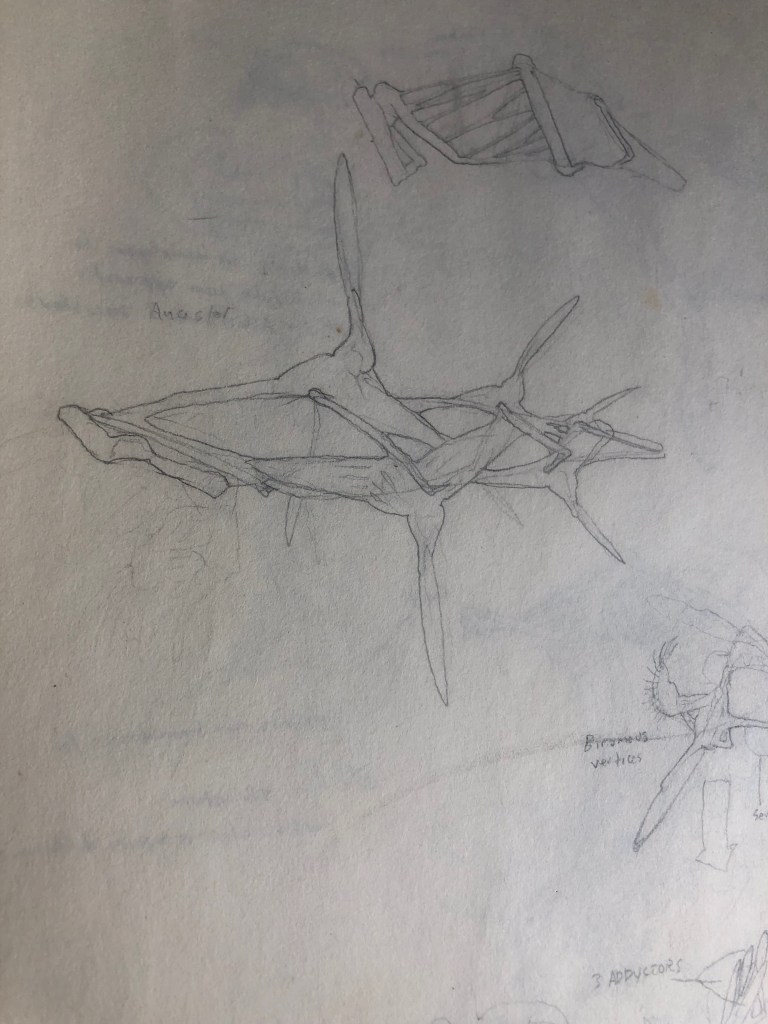
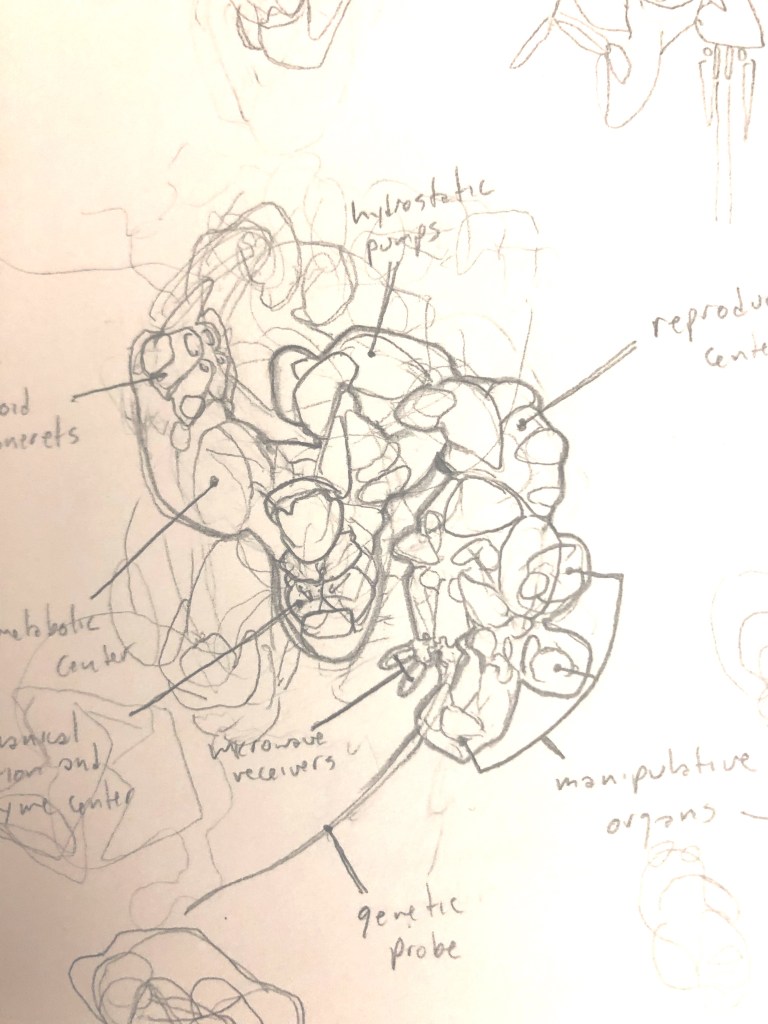
So anyway I will finally put up and shut up. Here are some of the alien organisms I designed in 1989.

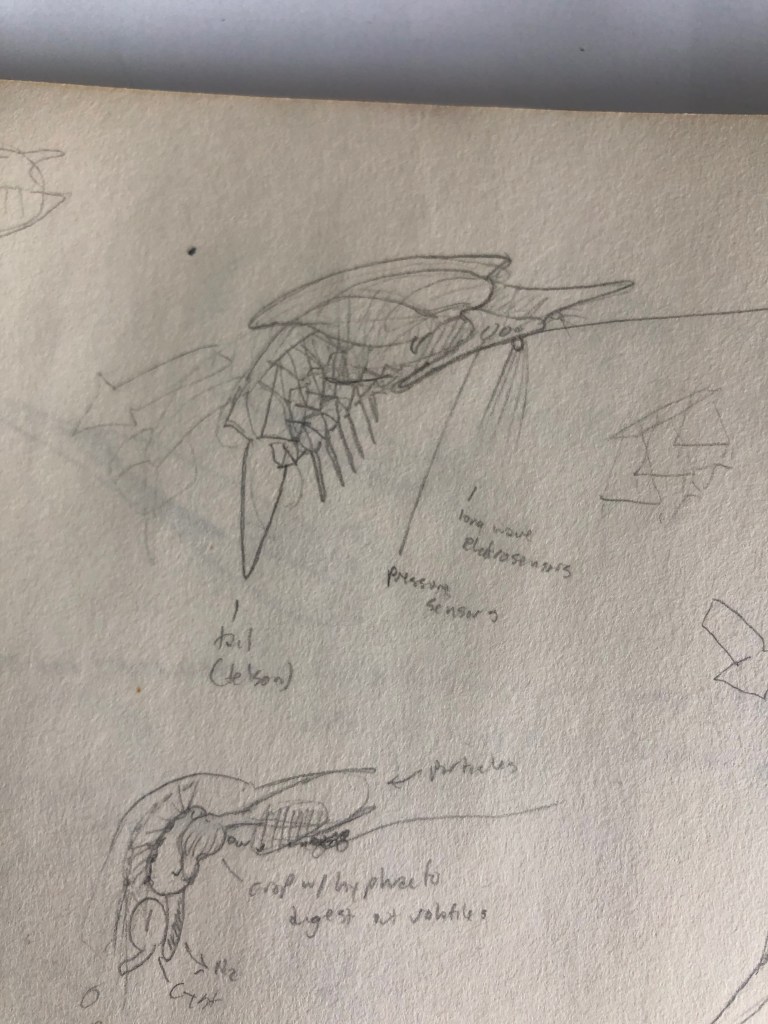
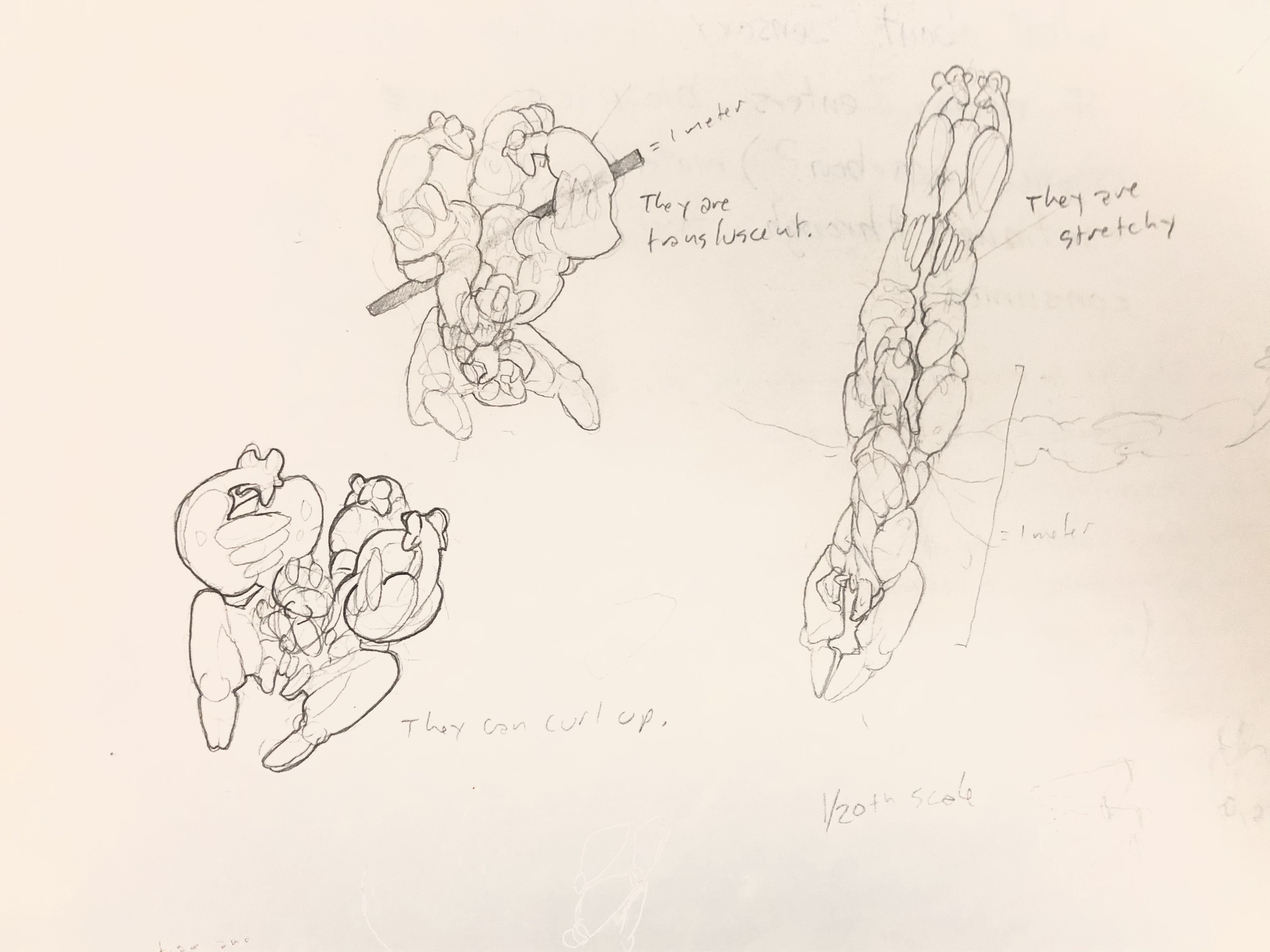
This is probably the most developed alien I designed. Three arms and three legs, about a meter long. It is capable of jumping a long distance, as it inhabits a large moon with very low gravity. Visible light never falls on it (light would be deadly as it would attack the organism’s organic molecules. So would oxygen). It “sees” in true RADAR; using both active and passive microwave and radio frequencies to sense what is around it. The long tendrils are used to feed on other organisms, exuding catalytic compounds that break down prey item’s heteropolymers for absorption.
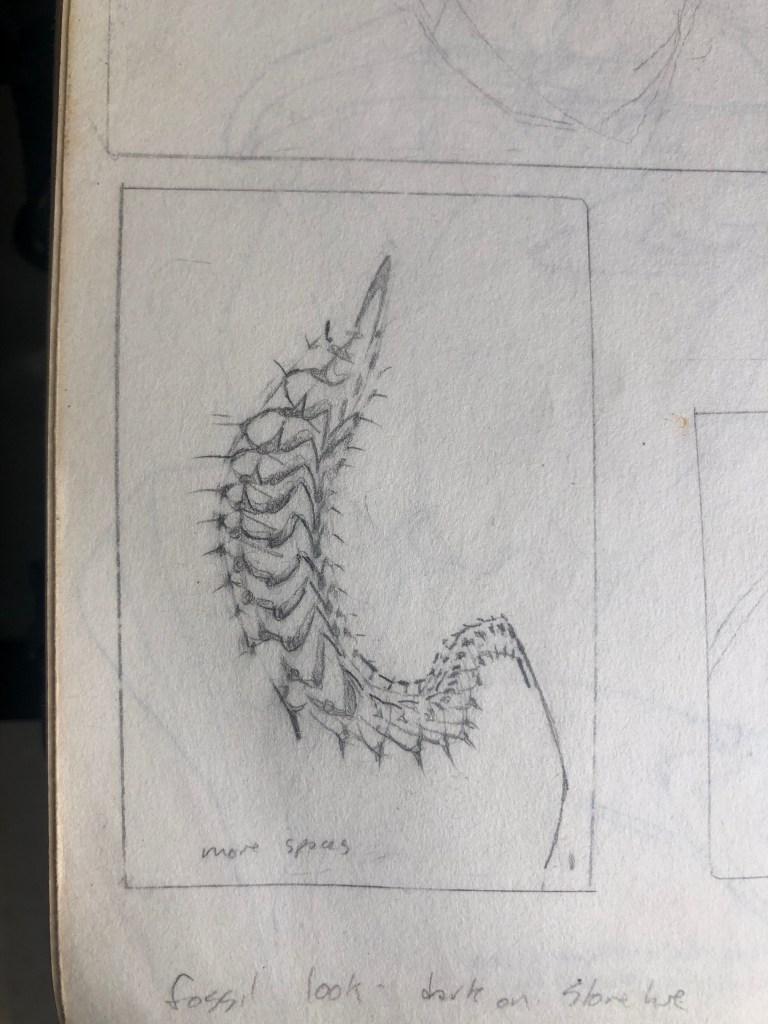
And here are some odds and ends